Back in 2016 we started a collaboration with Bath University (Prof. Karen Edler) where a Master student (Joost Zeeuw) explored samples that were suited to measure SANS and SEMSANS signal at the same time. At that time we had finished only 50% of the LARMOR SESANS spin echo parts, however this was enough to perform SEMSANS. A lot of hard work from the whole team (see post 2016 movie) resulted in the first ever true SEMSANS/SANS session. Everything worked out well but better samples and statistics were needed for publishable results. Roger Pynn, Steven Parnell en Fankan Li, joined the project with there superconducting triangle solution for SEMSANS and the final measurements were performed with some additional data from the SESANS in Delft.
Now we finally were able to publish the result with some nice coverage on the ISIS site: ISIS communication and here the direct link to the paper
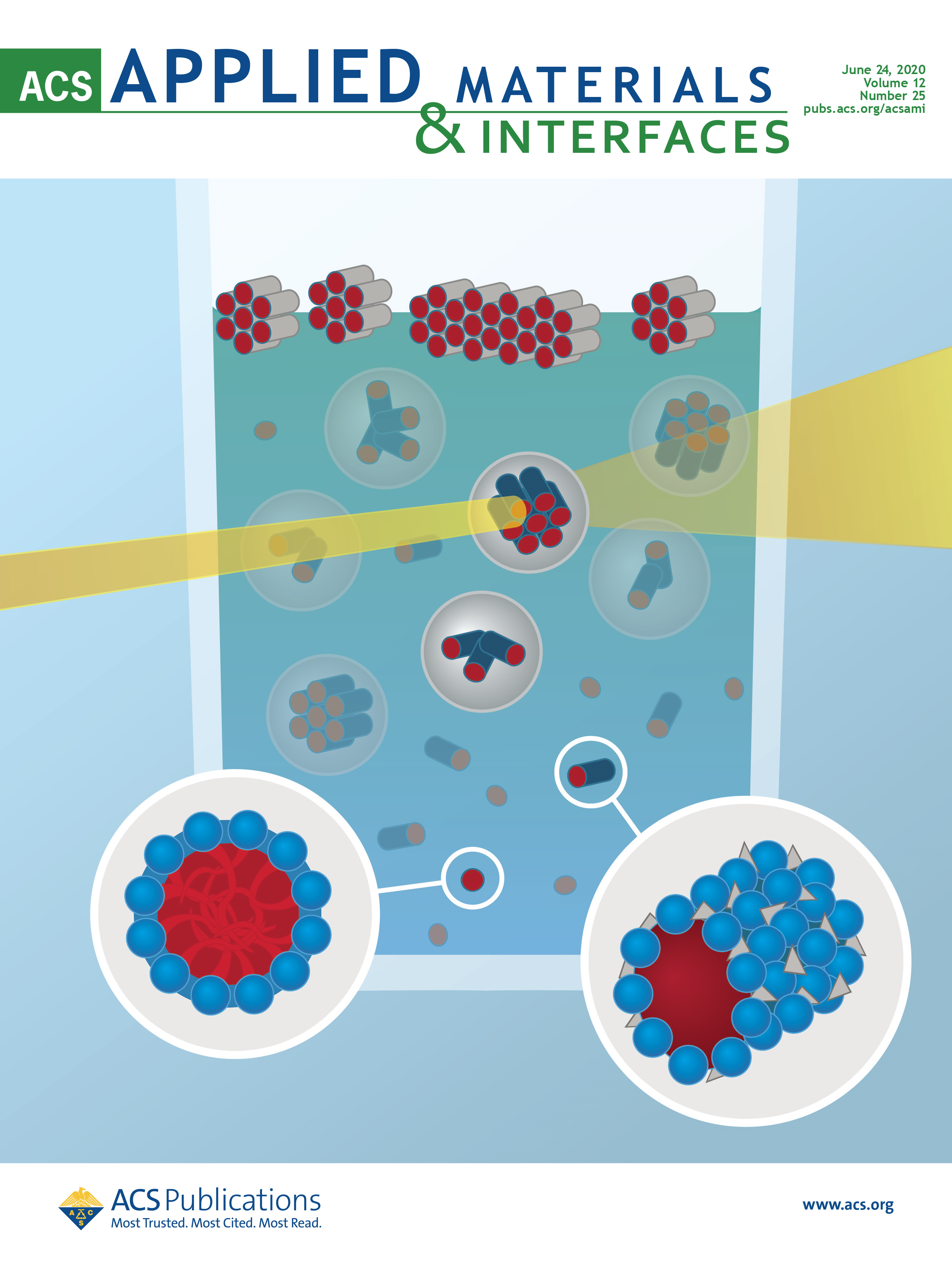
In addition we were given the cover of the journal which was designed by Ernst van der Wal, on of the project leaders for the LARMOR project from DEMO (TUDelft)